충돌 예측 시스템
단안 카메라로 실시간 충돌을 예측하는 알림 시스템
배경
- 자율 주행 기술이 적용된 배달 로봇 등의 상용화로 깊이 추정 기술에 대한 수요가 급증하고 있음
- 기존 거리 추정은 Lidar 센서를 이용하여 가능하나 비용이 비쌈
- 길거리에서 촬영된 영상은 사람들의 얼굴이 나오기 때문에 데이터로써 활용되기 어려움
기대 효과
- 단안 카메라 거리 측정 기술을 통한 안전 사고 방지
- 단안 카메라의 단점인 기상 악화 상황에서의 한계를 딥러닝을 이용해서 극복
- 비싼 Lidar 센서 대신 단안 카메라를 사용하여 비용 절감
나의 역할
- Python GUI 앱 구현
- 실시간 모델 서빙 서버 구현
사용 모델
- YoloWorld
- Depth Anything
프로젝트 구조
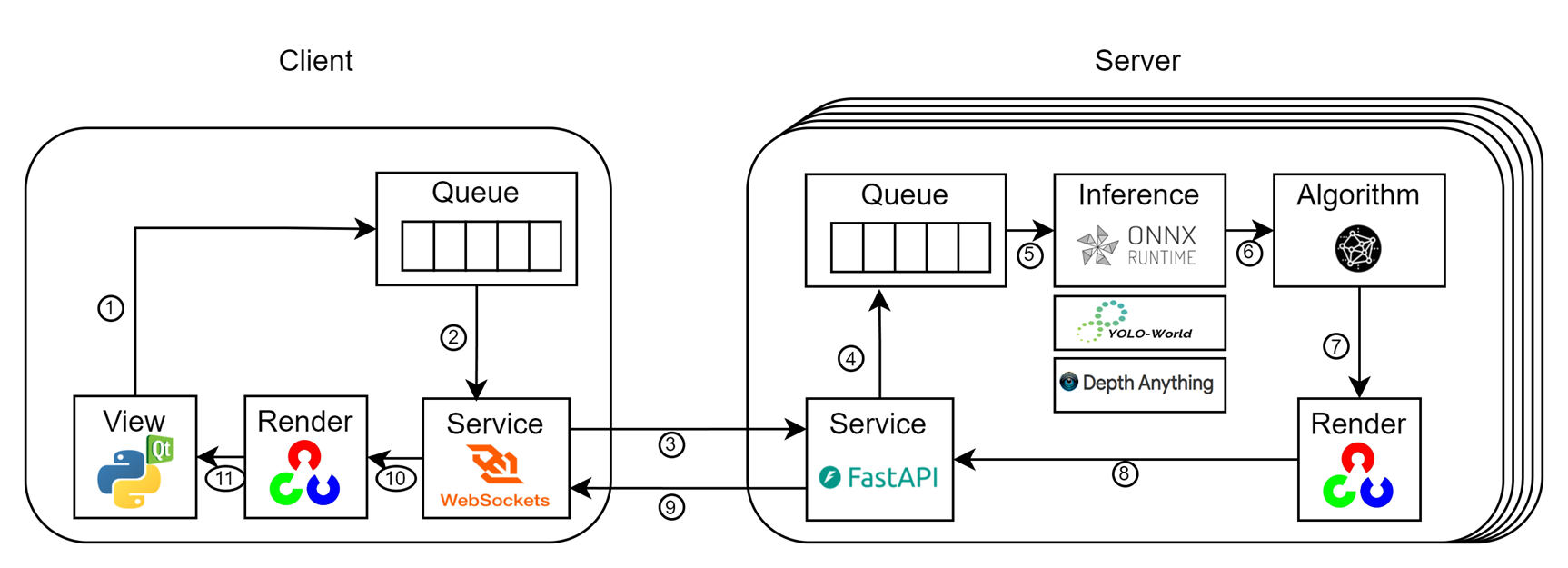
사용 기술
- PYQT5
- OpenCV
- WebSockets
- FastAPI
- Lock
- ONNX
- Pytorch
프로젝트 자료
*****
© 2025 Jaeyoung Heo.