Collision Prediction System
A Real-time Collision Prediction Alert System Using Monocular Cameras
Background
- The commercialization of delivery robots utilizing autonomous driving technology has significantly increased the demand for depth estimation technology.
- Traditional distance estimation is possible with Lidar sensors, but they are expensive.
- Videos captured on the streets often include people’s faces, making it difficult to use such data.
Expected Benefits
- Prevent safety accidents through distance measurement technology using monocular cameras.
- Overcome the limitations of monocular cameras in adverse weather conditions using deep learning.
- Reduce costs by using monocular cameras instead of expensive Lidar sensors.
My Role
- Implementation of Python GUI app.
- Implementation of real-time model serving server.
Models Used
- YoloWorld
- Depth Anything
Project Structure
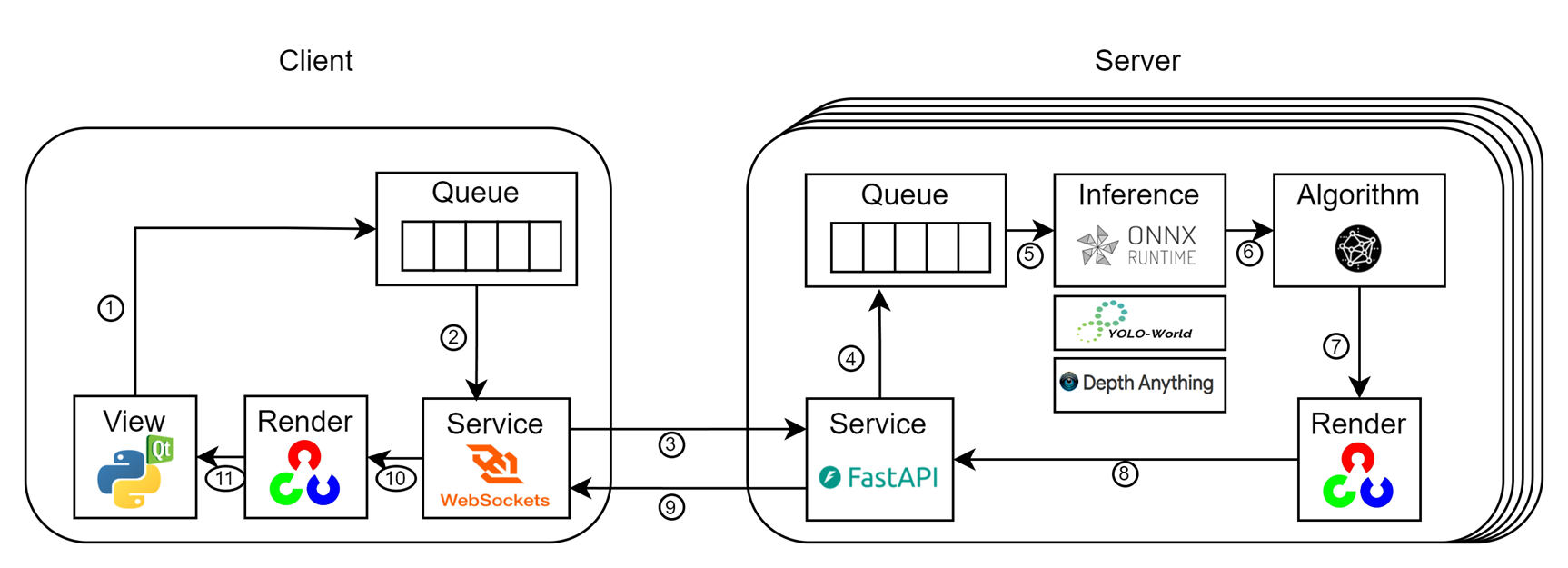
Technologies Used
- PYQT5
- OpenCV
- WebSockets
- FastAPI
- Lock
- ONNX
- Pytorch
Project Link
*****
© 2025 Jaeyoung Heo.